Omron Delta EtherCat Communication
Communication between Delta Electronics devices and Omron Automation Systems devices with EtherCat Communications protocol is quite simple.
Required Components
- EtherCat Master
- EtherCat Slave
- Cat 5 or above cable
- ESI
Using Omron's NX/NJ motion controller as a EtherCat master. Delta's RTU-ECAT as EtherCat slave. Both devices are connected via Cat 6 cable.
ESI
ESI(EtherCAT Slave Information) is XML scheme file which contains EtherCAT P(Derivative of POE) and Slave Configuration Information(SCI).
For RTU module, Delta provides ESI file from their Download Centre.
Download ESI file
- link1 (SHA256 Hash: D052E23CA544C6C5649E43B7C7DDA1A5EAF3A9A94F2982DF8D6E65AFC4CC1E36)
- link2 (SHA256 Hash: FF649AD45B5255AAC6E63C6DB21A1741026D1E5068092CACC7431206992742BE )
After download completed, open the zip file and extract Delta RTU-ECAT.xml.
Import Library
To import the ESI file,
- Navigate to
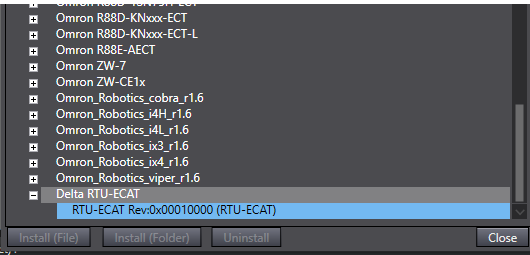
Configuarations and SetupinMultiview Explorerand SelectEtherCAT. - Right click on
Masterand selectDisplay ESI Library - Click on
Install(File)on pop-up menu & Select extractedDelta RTU-ECAT.xmlfile. - Navigate to the bottom in the ESI Library to check on Device in the library.
Add EtherCAT Slave
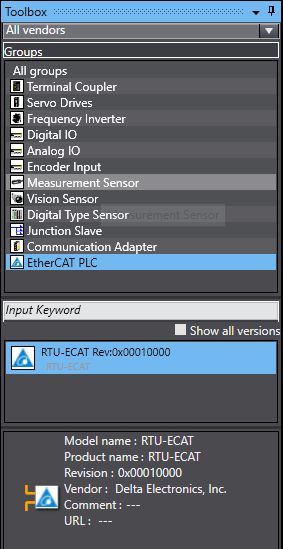
After library is imported, imported devices can be found in the Toolbox under all vendors or Delta Electronics, Inc. as EtherCAT PLC. Double click on RTU-ECAT to insert to the EtherCAT devices and Set Node address based your Network topology.
Adding IO modules to RTU
To add IO modules to the RTU unit, Select Edit Module Configuration. Select Required Module from Toolbox. select the slot and double click to insert to that slot.
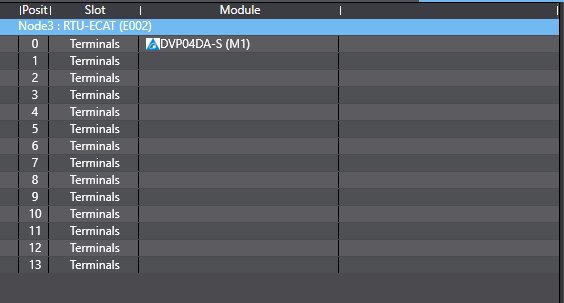
RTU-ECAT accepts up to 14 IO Modules
Conclusion
One downside with this approach is, checking & syncing actual configuration is not possible.